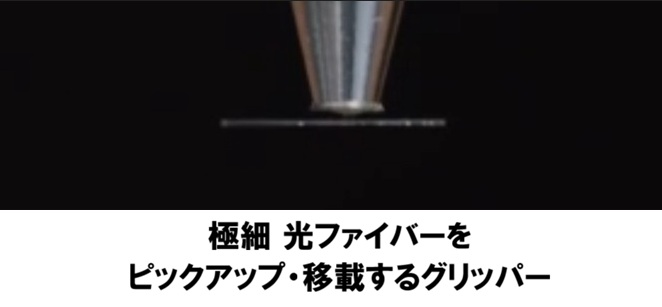
超音波ベアリングの技術を、部品をピックアンドプレースするロボットのハンドにする応用があります。ピックアンドプレースの間、部品は超音波ベアリングのソノトロード(高周波振動することにより周囲のガスを圧縮拡散するパーツです)で非接触で保持され、部品のハンドリングを行います。非接触のハンドリングなので、繊細で壊れやすい部品でもやさしくハンドリングすることができ、破損率を下げて歩留まり向上につながります。また、部品と接触しないことで、ハンドリング時の清浄度が向上し、汚染物質が部品へ転写する原因がなくなります。
ソノトロード(高周波振動することにより周囲のガスを圧縮拡散するパーツです)は、超音波による周期的な圧縮と圧縮解除を高周波数で行うことで、部品の平滑な表面とソノトロードの間に薄い空気の膜を形成します。同時に低い負圧を組み合わせることにより部品を非接触でチャックすることが出来るのです。非接触で保持された部品は振動することなく無摩擦で非常に安定した状態で浮上します。力のプロファイルは、エアブローによる負圧を用いた吸着(ベルヌーイチャック)に似ていますが、超音波ベアリングの技術が画期的なのはコンプレッサーが不要で、エアブローが必要ない事です。超音波ベアリングの技術は、ソノトロードとワークピースの間の空気または雰囲気ガスだけを用いて、ワークを非接触ハンドリングする力を生成しているのです。超音波ベアリングは、あらゆる大気中の搬送プロセスで運用できる技術です。
超音波ベアリングによる非接触ピックアンドプレースで様々なメリットがあります。
〇歩留まり向上
超音波ベアリングは、ワークピースに余分な負荷をかけません
接触式のハンドリングでは、ワークピースにはハンドが機械的に接触することで力が加わり、ワークが破損しやすい部品であれば歩留まり低減の原因になります。またベルヌーイチャックによるハンドリングでも強い負圧による力がワークに加わるので、繊細な部品のハンドリングには課題を残しています。超音波ベアリングのハンドリングでは、ワークの表面には力が均一に分散され、負荷を最小限に最適化します。ピックアンドプレースロボットに超音波ベアリングをハンドとして搭載することで歩留まり向上につながります。
〇コンプレッサーが不要
超音波ベアリングには、コンプレッサーが不要です。圧縮エアのミスト除去・油分除去のフィルター管理の手間がなくなります
〇低ランニングコスト
コンプレッサーが不要になることで、電気代が大きく削減します。下記に小さな部品ハンドリング用の装置のユーティリティーを記載していますが、この場合超音波ベアリングの消費電力はわずか20W(24VDC)です。
〇クリーンな環境に最適
超音波ベアリングは ベルヌーイチャックとは異なり、クリーン環境やラミナーフロールームの水平気流・垂直気流を乱すようなエアブローによる負圧で吸着する原理ではありません。
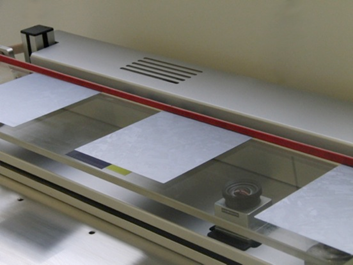
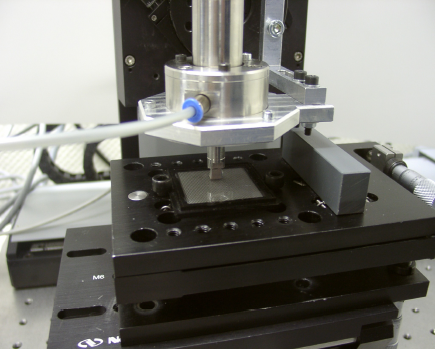
 写真1 小さなダイをハンドリング
写真1 小さなダイをハンドリング
写真1は、小さなダイを非接触でチャックしている写真です。最大加速度は5g(-50m/s2)。多軸ロボットに取り付けて運用できます。
写真2
写真2も小さなダイを非接触でハンドリングするシステムの写真です。
〇技術データ
電気容量 <20W/24V
重量 <500g
クリアランス(ダイ⇔ソノトロード) 50~70μm
最大化速度 5g(-50m/s2
フランジ カスタマイズ/DIN32565
可能なインターフェース PROFIBUS,PROFINET,EtherCAT,Digital I/O
低負圧 300cm3/min, 80mbar
8,000cm3/min, 400mbar

写真3 バッテリーアッセンブリに使用する部材をハンドリング
写真3は、電池のアッセンブリに使用する小さな部材のハンドリングのために特別に設計された装置です。ハンドリングする部材は、非接触で繊細な取扱が要求される部材です。ハンドリングプロセスでは、静電気も部材の品質劣化の原因になります。ロボットハンドによる接触式ハンドリングでは、剥離帯電の可能性がありました。そこで、非接触のハンドリング技術を検討作業が行われ、超音波ベアリングをロボットのハンドとして部材をハンドリングするシステムが設計されました。このシステムはセンタリング機能を搭載しているので、部材の滑り止めにサイドストップを付ける必要はありません(完全非接触)。ロボットは、部材を非接触でピックアップして、プレースポジションでバッテリーの中で直接リリースします。

写真4 レンズを非接触でハンドリング
レンズを非接触でハンドリング医療用レンズ、電子機器用レンズなどの高い品質が求められるレンズ部品は、製造プロセスでは品質を損なうことがないように取扱には細心の注意を払っています。製造プロセスのクリーン度の管理はもちろんですが、レンズを部品トレーに実装・取り出しするプロセスや、アッセンブリ(組立て)工程で、レンズを最終製品にマウントするプロセスがあり、異物の付着には厳格な管理体制が敷かれています。これらのプロセスでは、レンズへの異物・指紋・油分の付着を防ぐために、ロボットのハンド・真空パッド・テフロンパッドを用いることがあります。しかし、吸着式のパッドの場合、指紋の対策は出来ますが、レンズに直接触れる部分があるためパーティクルが転写する可能性があり、強いバキューム圧により吸着跡がレンズ表面に残る可能性や、吸引圧が周囲の雰囲気ガスを吸い込む気流によりレンズ表面に微小パーティクルを付着させる可能性があります。一方、精密レンズ部品の品質や精度への要求は厳しくなる傾向があります。歩留まりを下げずに、量産性を有するハンドリング技術には製造プロセスからのニーズがあります。超音波ベアリングには、レンズ部品を非接触でハンドリングするアプリケーションがあります。清浄度が高いレンズ部品のハンドリングのため、プロセスに合わせて最適化した装置をご提案いたします。写真4は、レンズの下側に超音波ベアリングのソノトロードが位置しており非接触でレンズが浮上しています。レンズの湾曲な表面に合わせて、ソノトロードを曲面状に製作しています。

写真5 CFRPを非接触でハンドリング
CFRPは、Carbon Fiber Reinforced Plasticsの略称で、炭素繊維強化プラスチックのことです。高い強度と軽さを備えた部材で、航空機・自動車・風車用ブレードなど産業界の様々な用途で応用が広がってきています。写真5の設備は、CFRPの加工プロセスでワークをハンドリングするために特別に設計されました。実際の工程では、プレス加工する前のCFRPの平滑な表面を非接触でハンドリングします。加熱したCFRPなので表面は高温です。超音波ベアリングのソノトロードが、非接触でワークをピックアップして、開いたプレス機の中でリリースを行います。高温で繊細な表面に触れずにワーク温度を逃がさないようにハンドリングするために特別に設計されています。
関 連 情 報
非接触超音波 浮上・搬送装置の詳細をみる
超音波非接触ピックアンドプレース レア動画公開!をみる
超音波 非接触搬送のブログをみる