ロボットアームや吸着コレットを使っていて、「表面が少し凸凹しているだけでリーク(空気漏れ)して落ちる…」なんて経験、一度はありますよね。
そのたびに現場が止まってしまうのは、正直かなりストレスです。
そんなお悩みを一撃で解決するのが、「ファンデルワールス力(分子間力)」を活用した吸着グリッパーです。
ヤモリの足裏の接着原理を生体模倣
ヤモリの足裏には、無数の極細のピラーがびっしり生えてます。
ピラーが壁や天井に触れると、ファンデルワールス力(分子間力)が発生して、吸着します。
グリッパーにも、ヤモリの足裏のように無数の人工的なピラーを装着しています。ピラーが基材表面に触れると分子間力で吸着することが出来ます。
このグリッパーの凄さは、「物理的な吸引力を適用している」点にあります。
・完全ユーティリティーフリー: 電気も、エアも、真空ポンプも一切不要。配線やホースの取り回しに頭を悩ませる必要はありません
・分子レベルの密着: ヤモリの指先と同じ原理。ピラー構造が対象物の表面に食いつき、分子間力(ファンデルワールス力)で吸着します。
・凸凹も怖くない: 吸引・バキュームするグリッパーのように「空気が漏れる」という概念そのものがありません。多孔質素材やザラザラした面でも、置くだけで吸着可能です。
→ガラス・レンズ・プリント基板・ウェーハ・チップ・小さな樹脂歯車・多孔質/ポーラス状の表面・フィルム 等々
様々な基材をピックアンドプレースする用途に適用することが出来ます。
写真:樹脂成型品の凸凹面を吸着してピックアップ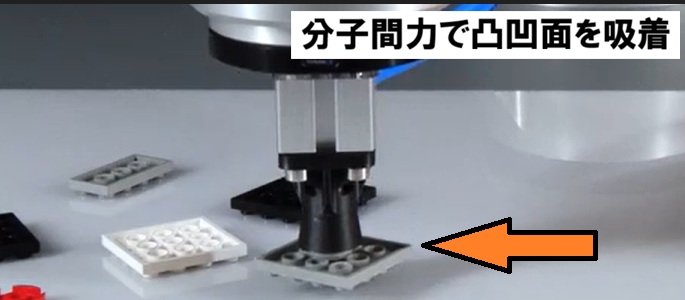
現場の問題を こう変える
このグリッパーは、使い方もフレキシブル。現場のニーズに合わせて使い分けが可能です。
| 利用シーン | 内容 |
| 手作業(吸着ペン) | 研究開発や検査作業で、小さな部品をピンセット感覚でピックアップ。 |
| 自動化(ロボット) | ロボットアームの先端に装着。ティーチングの手間を減らして安定稼働。 |
まとめ
◆ユーティリティーフリー!
<電気・圧縮エア・バキューム 不要>
◆物理的な吸着原理
<ただ触れるだけで吸着>
◆手作業で製品をピックアップ・仕分けする現場にはペンタイプのゲッコーペン
◆ロボットに持たせて自動化の用途にはゲッコ―接着グリッパー
関 連 情 報
ゲッコーペン(ペンタイプ)
ゲッコ―接着グリッパー(吸着コレット)
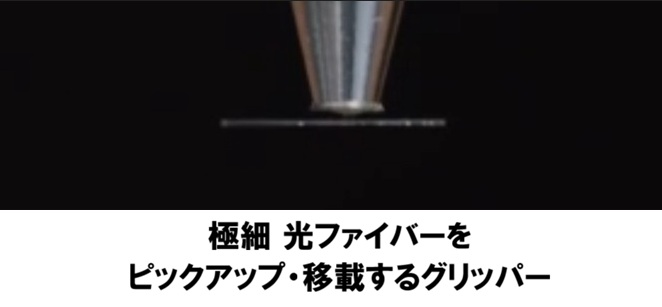
乾式接着 小さなレンズの移載に|ゲッコーペン
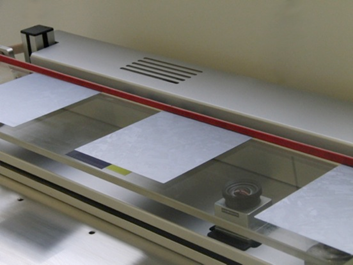
マイクロLEVIグリッパー(超音波 非接触 吸着)
レンズを超音波で非接触浮上させる技術
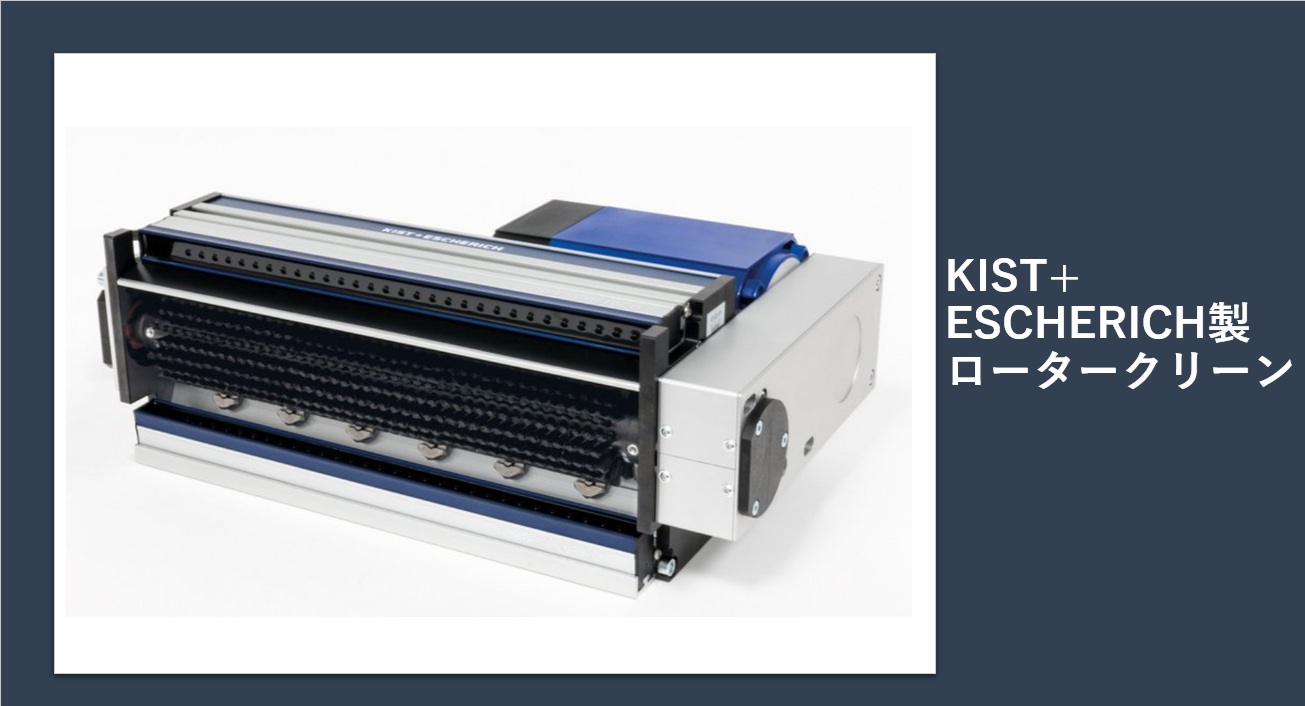
レンズのコンタミをCO2スノーでドライ洗浄
【ゴミ・異物・コンタミ】乾式洗浄装置の解決方法 をみる
製造現場の静電気 | 基礎から学び不良低減につなげよう!をみる